{kind=link}
{kind=link}
Moving Forward Challenge
Program the VEX IQ robot to move forward stop in three locations lift its arm on each one and go back to the start.
2/24/17 Think
Today we will start programming our robot using the VEX IQ website intro videos. I think we will be done with this today.
Do:
We have finished the first challenge in one day on our second attempt.We plan on doing the next challenge.on Monday.
{kind=link}
{kind=link}
Turning Around Challenge
In this challenge we have to make our robot move through 3 spermatozoa lines moving along both sides then come back to the start.
2/24/17 Think
Today we are going to start the orchard challenge.We will have to watch the introduction videos and program the basic commands.
Do:
We have programmed our robot to maneuver the first line and position it self to the second.On Thursday we plan on maunuvering it around the second.
2/30/17 Think
Today we plan on programming our robot to maneuver around the second line and even the third.We also may finish the challenge today if we are productive.
Do:
We have programmed our robot to maneuver around the second line and a bit into the third.We hope to finish it tommorow.
2/31/17 Think
Today we plan on programming the robot to maneuver around the third line and maybe even finish the challenge
Do:
We have finally finished our maze challenge.Next Walker and I are going to do the Touch sensor challenge which we are going to start a bit today.
{kind=link}
{kind=link}
Touch Sensor Challenge
In this challenge we will have to program our VEX IQ robot to lower its gripper to the Down position(acknowledged by arm touching the Bumber Switch), move forward for a certain amount of distance,then grab a container and bring it back to the starting location
2/31/17
For the rest of this period Walker and I plan on starting this challenge a bit and watch all the intro videos and tutorials.
Do:
We almost finished the touch sensor challenge.We have the correct code for moving forward lifting the claw and moving backwards,but we need to get the claw to bump the button to commence the code which it won't do.We plan on finishing this challenge on Monday.
3/3/17 Think
Today we were planning on finishing the challenge but my partner walker is gone for the day and our code was on his account on the computer.So I don't know how I'm going to access it.
Do:
I have done the same thing walker and I did in the old program,but I did not finish it.I will wait to see if walker will come tommorow.
3/4/17 Think
Today I plan on continuing the code I started yesterday.Walker is not here today either,so I'm going to have to do this myself again.
Do:
I have completed the touch sensor challenge today after a 1 and a half day period.For the rest of the period I will work on my spark page and if I'm finished the next challenge.
{kind=link}
{kind=link}
Dynamic Maze Challenge
In this challenge we will have to program our robot to move from the starting area through a maze with tall vertical walls.We will have to use the Ultrasonic Sensor to navigate through the maze without touching any walls and ultimately reaching the goal zone regardless of what the distances were between the walls.
3/4/17
Today I plan watching the tutorial videos on the challenge and start the basic code for it.I don't expect to get much done in the final 10 min of class.
Do:
I have watched the videos so now tommorow I will start coding and start completing the challenge.
4/5/17 Think
Today I plan on starting the basic code for the Dynamic Maze Challenge.I may also finish today if everything goes well.Walker is also not back yet.
Do:
I have finished the Dynamic Maze Challenge myself in the same day I started.Tommorow I plan on doing the next challenge.
{kind=link}
{kind=link}
Mower Challenge
In this challenge we will have to program our robot to drive over the entire game board.The robot can freely maneuver in straight lines but must rely on the Gyro Sensor to turn.
4/6/17 Think
Walker is back so we can start the next challenge together.We plan on doing a lot today like watching the videos and starting the basic code.
Do:
Today we programmed the basic program like the beginning.Tommorow we will see if we can finish and video tape it.
4/7/17 Think
Today we will try to finish our programming and finish the challenge.We will also add a color light up for decoration after we are done.
Do:
We have gotten 3/4 of our programming done.On Monday we plan on finishing our code and the challenge.
4/10/17 Think
Today we know we will finish.So once we finish we will start the next challenge and watch the videos for that
Do:
We have completed the mower challenge early in the class period so now we will start the traffic light challenge in our extra time.
{kind=link}
{kind=link}
{kind=link}
Traffic Signal Challenge
In this challenge we will have to program our robot to navigate through 3 different intersections,each of which has a traffic signal which will start as red gen switch to green.The robot must stop at each red signal,and wait before it switches to green before moving forward again.
4/10/17 Think
We plan on working on the challenge for the rest of the class period and add the last challenge to our spark page.Walker says we may finish today
Do:
We have completed the traffic light challenge on the same day we completed the mower challenge.So now all we have to do now is add the mower and the traffic light challenge to our spark pages.
{kind=link}
{kind=link}
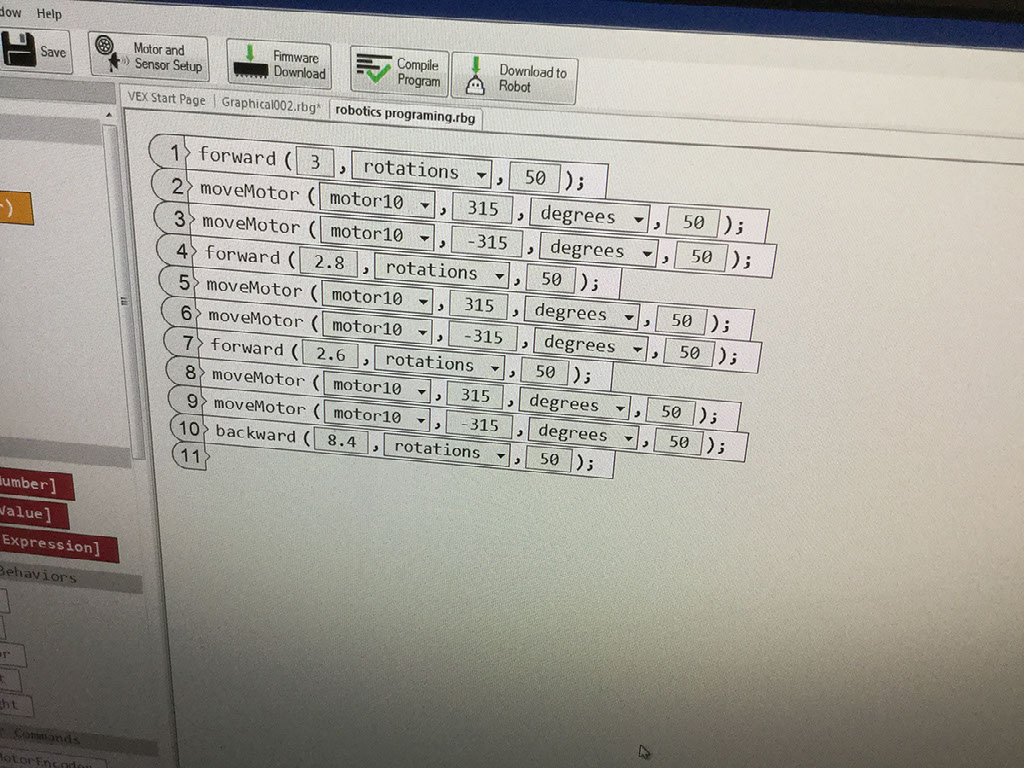
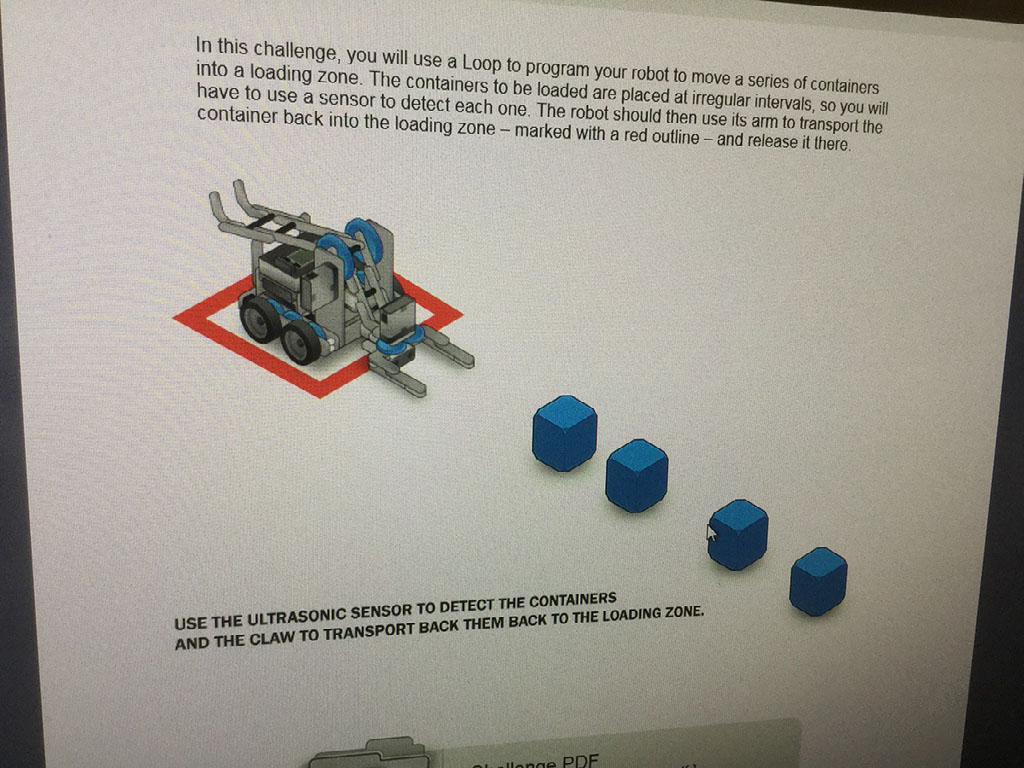
Container Transporter Challenge
In this challenge we will use a loop to program our robot to move a series of containers into a loading zone.The containers to be loaded are placed at irregular intervals ,so we will have to use a sensor to detect each one.
4/11/17 Think
Today I plan on watching the intro videos and build the basic code.Walker is not here today so that means I will have to work by myself.
Do:
I did not get that much stuff done today because the gyro sensor was acting weird and it took some time to fix and update it.I hope walker will arrive Tommorow .
4/12/17 Think
Today we will start the basic code and watch the tutorial videos because we did not get to that yesterday.Walker is also back.
Do:
Today we programmed our robot to sense the blocks and the drop of zone.Tommorow I bet we will finish.
4/13/17 Think
Today we plan on coding the code that will make our robot sense a block pick it up then come back.We may finish today
Do:
We did not finish because there was a problem with our color sensor which detected green to be violet or blue.We will fix the problem on Monday.
4/17/17 Think
Walker is gone today,again,so I will have to restart the code for the challenge if he does not come back.
Do:
Walker came back right after,so we programmed the complete code for the challenge,but it wont work because there's something wrong with the gyro sensor and is not trouncing correctly.We hope to fix this Tommorow.
4/18/17 Think
Today we plan on fixing the gyro sensor problem and probably complete the challenge today.
Do:
Walker and I found that completing this challenge was impossible for us so Mr.Spodick told us we completed it by default,so for the rest of the period we plan on watching the vids for the next challenge.
{kind=link}
{kind=link}
Strawberry Plant Sorter Challenge
In this challenge,we will have to use a combination of loops and else/ifs blocks to repeat an inspection process on a number of boxes,representing plants.The robot will move the plant then sort it to either the robots right side if it's ripe (red)or its left side if it's not ripe (green).
4/18/17 Think
Today walker and I are planning on building the basic start of our code and watch the vids on the site for the rest of the day.
Do:
Today we almost completed the challenge,and we would of if we used the repeat command right.
4/19/17 Think
Today we plan on finishing the Strawberry challenge.After Walker and I our going to start the next challenge and watch those vids.
Do:
We did not even work on our challenge because walker put off his spark page until the last moment and we had to do his spark page for the whole period.
4/20/17 Think
Today we plan on finishing the strawberry challenge.But Walker also has to do his 13 day entry gap,so we may not get to the challenge.
Do:
I finished the challenge by myself because walker was on his spark page.So now I will work on my page conclusion and bring in the vid.
{kind=link}
{kind=link}
Obstacle Orchard Challenge
In this challenge we will have to program the robot to move from the starting area through 3 rows of fruit trees Passing along both sides of each row.In addition there will be randomly placed obstacles throughout the orchard.The robot should not touch these obstacles,instead when it encounters it it should stop and wait till there moved,then it will continue.
4/21/17 Think
Today walker and I plan on watching the beginning videos and do the beginning of the code.Walker still has to do his spark page.
Do:
Walker caught up with his spark page and we have completed the challenge.Monday we are going to start the next challenge on a different spark page
{kind=link}
Conclusion
We have completed all of our challenges in almost one month,and we have finished a bit earlier than everyone else.Walker was a great programmer,even though it was his first time really programming.Even though we encountered some hardships,like walker being gone for a week or stuff wouldn't work,we still completed everything with success.