{kind=link}
Maze Runner
Project Description
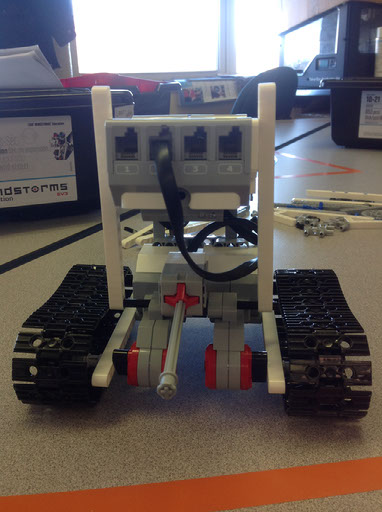
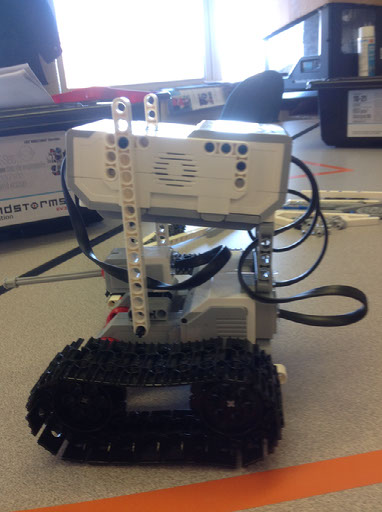
The prime directive of this project was to weave the robot through a maze using either the touch or ultrasonic sensor.
What I Learned
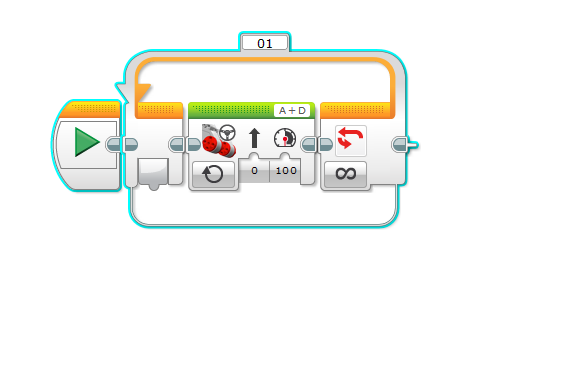
After my last experience with the ultrasonic sensor I decided to try something new with the touch sensor. It took me a little bit to figure out exactly how it worked, but once I did I discovered the touch sensor is great. I also learned that tires are not the best things to use when trying to make sharp, exact turns. The caterpillar tracks are much better at providing sharp turns because of the tank programming block. Through the tank block I was able to program the amount of power I wanted put into each individual engine, which provided for a perfect ninety degree turns.
Link to Flowchart:https://www.lucidchart.com/invitations/accept/66e29f61-0b86-410a-8cd1-f299e9b175d7
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Speed Racer
Project Description
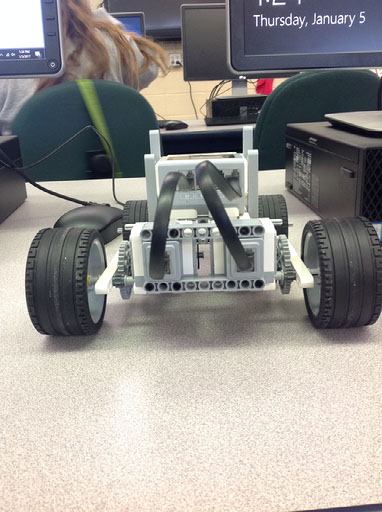
The prime directive of this project was to create the fastest robot possible in order to compete in a drag race.
What I Learned
I learned that the right amount of weight distribution and mix between torque and horsepower makes all the difference. Since there was no way for my bot to perform a gear shift to gain more speed I had to try and find a balance of torque and horsepower.
Link to flowchart:https://www.lucidchart.com/invitations/accept/cbb2bf5b-5264-4e0f-9e1c-179715d05c0d
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Credits:
Created with images by skeeze - "robonauts touching fingers fingers"